 RSS Feed
RSS Feed
 Twitter
Twitter






 13:32
13:32
 Unknown
Unknown
หลักการทำงาน

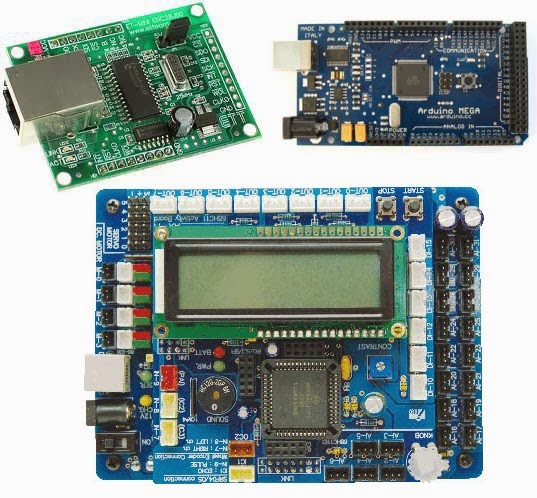
Wiring Digaram

Arduino Code
Wiring Digaram
Arduino Code
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// a maximum of eight servo objects can be created
int pos = 0; // variable to store the servo position
int motor = 0;
void setup()
{
Serial.begin(9600); // initialize serial:
myservo.attach(9); // attaches the servo on pin 9 to the servo object
Serial.print("Arduino control Servo Motor Connected OK");
Serial.print('\n');
}
void loop()
{
// if there's any serial available, read it:
while (Serial.available() > 0) {
// look for the next valid integer in the incoming serial stream:
motor = Serial.parseInt();
// do it again:
pos = Serial.parseInt();
// look for the newline. That's the end of your sentence:
if (Serial.read() == '\n') {
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
// print the three numbers in one string as hexadecimal:
Serial.print("Data Response : ");
Serial.print(motor, DEC);
Serial.print(pos, DEC);
}
}
}
//for(pos = 0; pos < 180; pos += 1) // goes from 0 degrees to 180 degrees
//{ // in steps of 1 degree
// myservo.write(pos); // tell servo to go to position in variable 'pos'
// delay(15); // waits 15ms for the servo to reach the position
//}
//for(pos = 180; pos>=1; pos-=1) // goes from 180 degrees to 0 degrees
//{
// myservo.write(pos); // tell servo to go to position in variable 'pos'
// delay(15); // waits 15ms for the servo to reach the position
//}
//val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
//val = map(val, 0, 1023, 0, 179); // scale it to use it with the servo (value between 0 and 180)
//myservo.write(val); // sets the servo position according to the scaled value
//delay(15);
App Andorid
ขอบคุณ http://microcontrollerkits.blogspot.com/2014/01/arduino-usb-control-servo-motor.html


















































{kind=link}