RSS Feed
RSS Feed
 Twitter
Twitter






 08:20
08:20
 Pornprasert
Pornprasert
วันนี้จะสอนการใช้งานโปรแกรม GX Developer เบื้องต้น มาเริ่มกันเลยครับ
เมื่อติดตั้งโปรแกรม GX Developer เสร็จให้คลิก start>all program>MELSOFT Application>GX Developer ตามรูปด้านล่าง

หน้าจอโปรแกรม GX Developer มี 4 ส่วน คือ


มารู้จักส่วนแรก Project Data List เป็นส่วนที่ทำหน้าที่ในการแสดงรายละเอียดของโปรแกรม แบ่งออกเป็น ส่วนของโปรแกรมที่ออกแบบ(Program), แสดงรายละเอียดของอุปกรณ์(Device Comment) และส่วนที่แสดงรายละเอียดของอุปกรณ์์ใน PLC รุ่นที่เลือกใช้(PLC Parameter)
ส่วนที่ 2 Toolbar เป็นส่วนที่นำเสนอปุ่มแสดงคำสั่งที่ใช้ในการใช้งานออกแบบโปรแกรม PLC

ส่วนที่ 3 Status bar ใช้สถานะของโปรแกรมในขณะนั้น

ส่วนที่ 4 Program Mode Area เป็นพื้นที่ที่ใช้ในการออกแบบโปรแกรมตามลักษณะที่ผู้ใช้ต้องการในการออกแบบโปรแกรม ซึ่งสามารถเลือกรูปแบบการออกแบบ เช่น การออกแบบโปรแกรม Ladder,IL เป็นต้น

การสร้างโปรแกรม
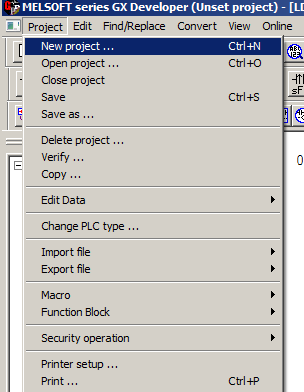
ไปที่ Project > New Project
เลือก PLC Series ดูจากตัว PLC ว่าเป็นรุ่นอะไรเลือกให้ตรงครับ

เลือก PLC Type ดูจากตัว PLC

เลือก Program type มี 2 ภาษา Ladder,SFC

เมื่อติดตั้งโปรแกรม GX Developer เสร็จให้คลิก start>all program>MELSOFT Application>GX Developer ตามรูปด้านล่าง
หน้าจอโปรแกรม GX Developer มี 4 ส่วน คือ
- Project data list
- Toolbar
- Status bar
- Program Mode Area

มารู้จักส่วนแรก Project Data List เป็นส่วนที่ทำหน้าที่ในการแสดงรายละเอียดของโปรแกรม แบ่งออกเป็น ส่วนของโปรแกรมที่ออกแบบ(Program), แสดงรายละเอียดของอุปกรณ์(Device Comment) และส่วนที่แสดงรายละเอียดของอุปกรณ์์ใน PLC รุ่นที่เลือกใช้(PLC Parameter)
ส่วนที่ 2 Toolbar เป็นส่วนที่นำเสนอปุ่มแสดงคำสั่งที่ใช้ในการใช้งานออกแบบโปรแกรม PLC
ส่วนที่ 3 Status bar ใช้สถานะของโปรแกรมในขณะนั้น
ส่วนที่ 4 Program Mode Area เป็นพื้นที่ที่ใช้ในการออกแบบโปรแกรมตามลักษณะที่ผู้ใช้ต้องการในการออกแบบโปรแกรม ซึ่งสามารถเลือกรูปแบบการออกแบบ เช่น การออกแบบโปรแกรม Ladder,IL เป็นต้น

การสร้างโปรแกรม
ไปที่ Project > New Project
เลือก PLC Series ดูจากตัว PLC ว่าเป็นรุ่นอะไรเลือกให้ตรงครับ
เลือก PLC Type ดูจากตัว PLC
เลือก Program type มี 2 ภาษา Ladder,SFC